Indice
Descrizione
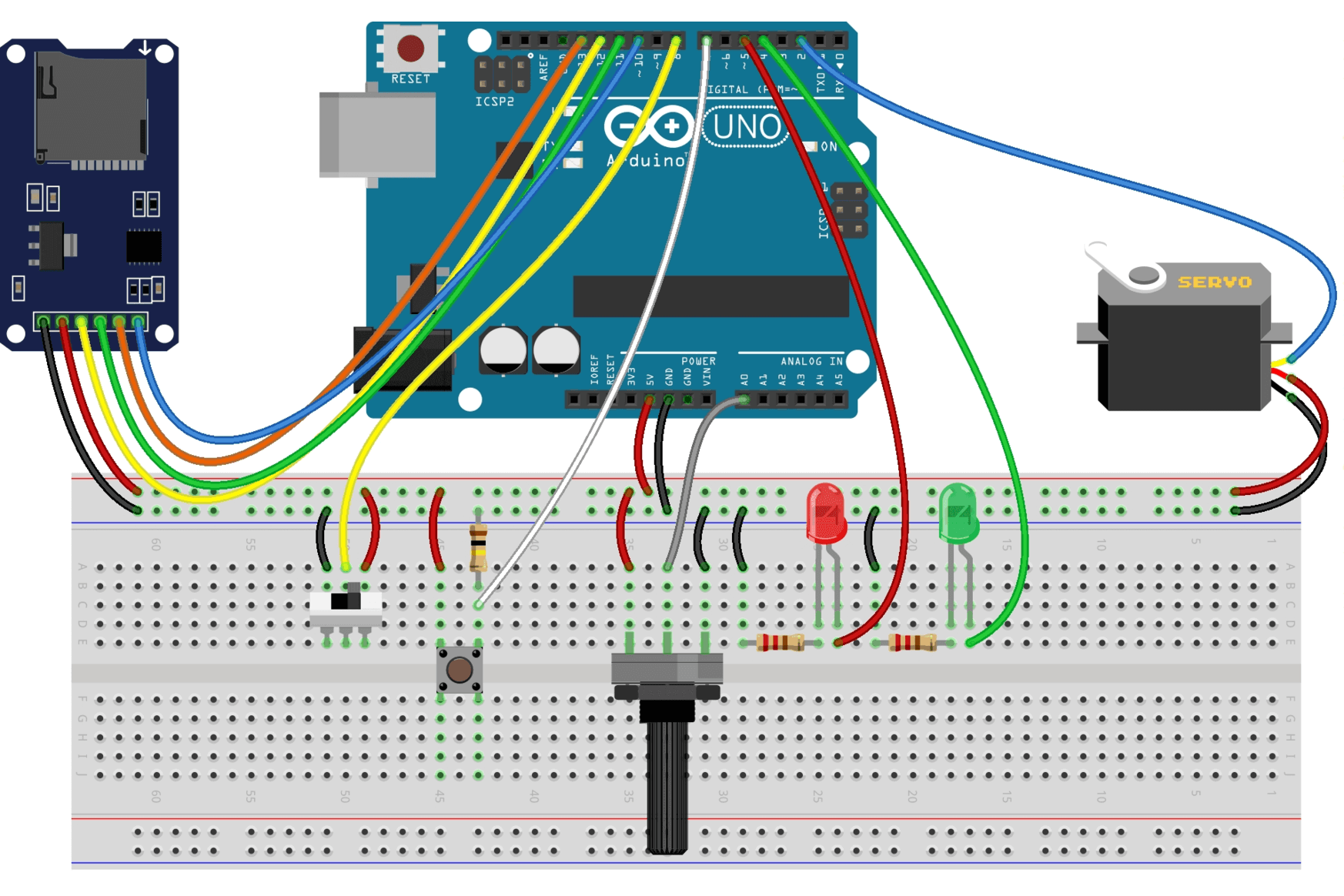
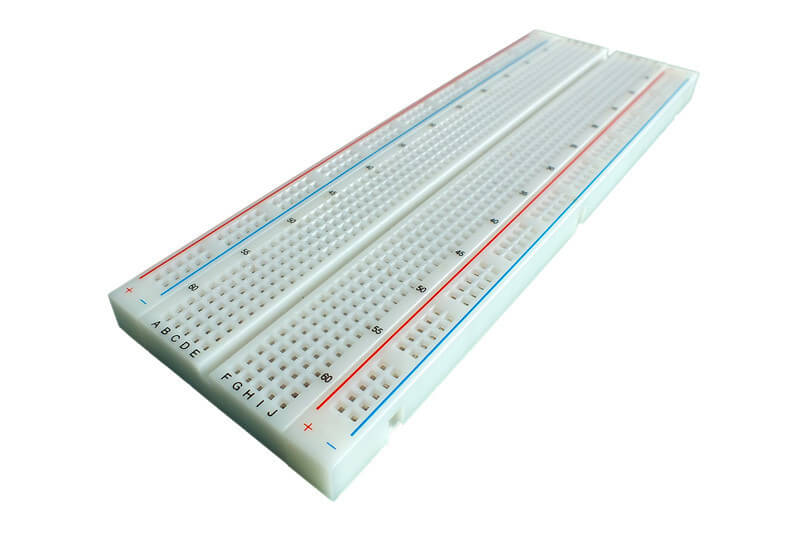
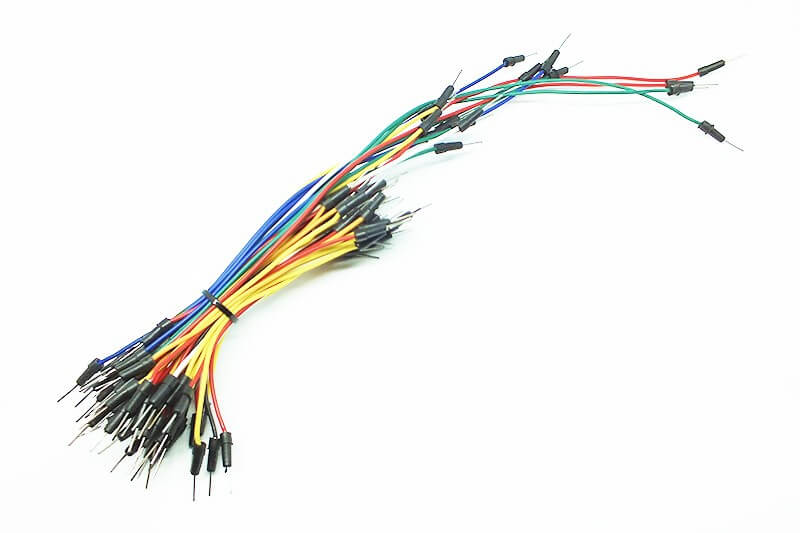
In questo video scoprirai come usare le schede SD / microSD con Arduino. Vedremo come creare il circuito e programmare lo sketch per leggere e scrivere le informazioni sulle schede SD.
In particolare ti spiego come salvare i movimenti di un servomotore per poi riprodurli in automatico.
#include <SD.h>#include <Servo.h> #define SD_PIN 10#define SWITCH_PIN 8#define BUTTON_PIN 7#define POTENTIOMETER_PIN A0#define RED_LED_PIN 5#define GREEN_LED_PIN 4#define SERVO_PIN 2 #define FILE_NAME "servo.txt" File file;Servo servo; bool enable = false; void setup() { if (!SD.begin(SD_PIN)) { while (true); } if (SD.exists(FILE_NAME)) { SD.remove(FILE_NAME); } servo.attach(SERVO_PIN); pinMode(SWITCH_PIN, INPUT); pinMode(BUTTON_PIN, INPUT); pinMode(RED_LED_PIN, OUTPUT); pinMode(GREEN_LED_PIN, OUTPUT);} void loop() { if (digitalRead(SWITCH_PIN) == HIGH && !enable) { file = SD.open(FILE_NAME, FILE_WRITE); digitalWrite(RED_LED_PIN, HIGH); enable = true; delay(300); } else if (digitalRead(SWITCH_PIN) == LOW && enable) { file.close(); digitalWrite(RED_LED_PIN, LOW); enable = false; delay(300); } int value = analogRead(POTENTIOMETER_PIN); int position = map(value, 0, 1023, 0, 179); servo.write(position); if (!enable) { return; } if (digitalRead(BUTTON_PIN) == HIGH) { if (file) { digitalWrite(GREEN_LED_PIN, HIGH); file.println(position); delay(300); digitalWrite(GREEN_LED_PIN, LOW); } } delay(10);}
#include <SD.h>#include <Servo.h> #define SD_PIN 10#define SWITCH_PIN 8#define BUTTON_PIN 7#define POTENTIOMETER_PIN A0#define RED_LED_PIN 5#define GREEN_LED_PIN 4#define SERVO_PIN 2 #define FILE_NAME "servo.txt" #define SPEED_MIN 1#define SPEED_MAX 5 File file;Servo servo; bool enable = false;int currentPosition = 90;int nextPosition = 90;int fileCursor = 0; void setup() { if (!SD.begin(SD_PIN)) { while (true); } servo.attach(SERVO_PIN); servo.write(currentPosition); pinMode(SWITCH_PIN, INPUT); pinMode(BUTTON_PIN, INPUT); pinMode(RED_LED_PIN, OUTPUT); pinMode(GREEN_LED_PIN, OUTPUT);} void loop() { if (digitalRead(SWITCH_PIN) == HIGH && !enable) { file = SD.open(FILE_NAME, FILE_READ); file.seek(fileCursor); digitalWrite(GREEN_LED_PIN, HIGH); enable = true; delay(300); } else if (digitalRead(SWITCH_PIN) == LOW && enable) { file.close(); digitalWrite(GREEN_LED_PIN, LOW); enable = false; delay(300); } if (!enable) { return; } if (digitalRead(BUTTON_PIN) == HIGH) { digitalWrite(RED_LED_PIN, HIGH); nextPosition = currentPosition; delay(300); digitalWrite(RED_LED_PIN, LOW); } if (nextPosition != currentPosition) { int value = analogRead(POTENTIOMETER_PIN); int speed = map(value, 0, 1023, SPEED_MIN, SPEED_MAX); if (nextPosition > currentPosition) { currentPosition += min(speed, nextPosition - currentPosition); } else if (nextPosition < currentPosition) { currentPosition -= min(speed, currentPosition - nextPosition); } servo.write(currentPosition); } else { int n = readLine(); if (n >= 0 && n <= 179) { nextPosition = n; } } delay(10);} int readLine() { if (!file) { return -1; } if (file.available()) { String msg = file.readStringUntil('\n'); fileCursor = file.position(); return msg.toInt(); } else { file.seek(0); fileCursor = 0; return -1; }}
In qualità di Affiliato Amazon riceviamo un guadagno dagli acquisti idonei