Indice
Descrizione
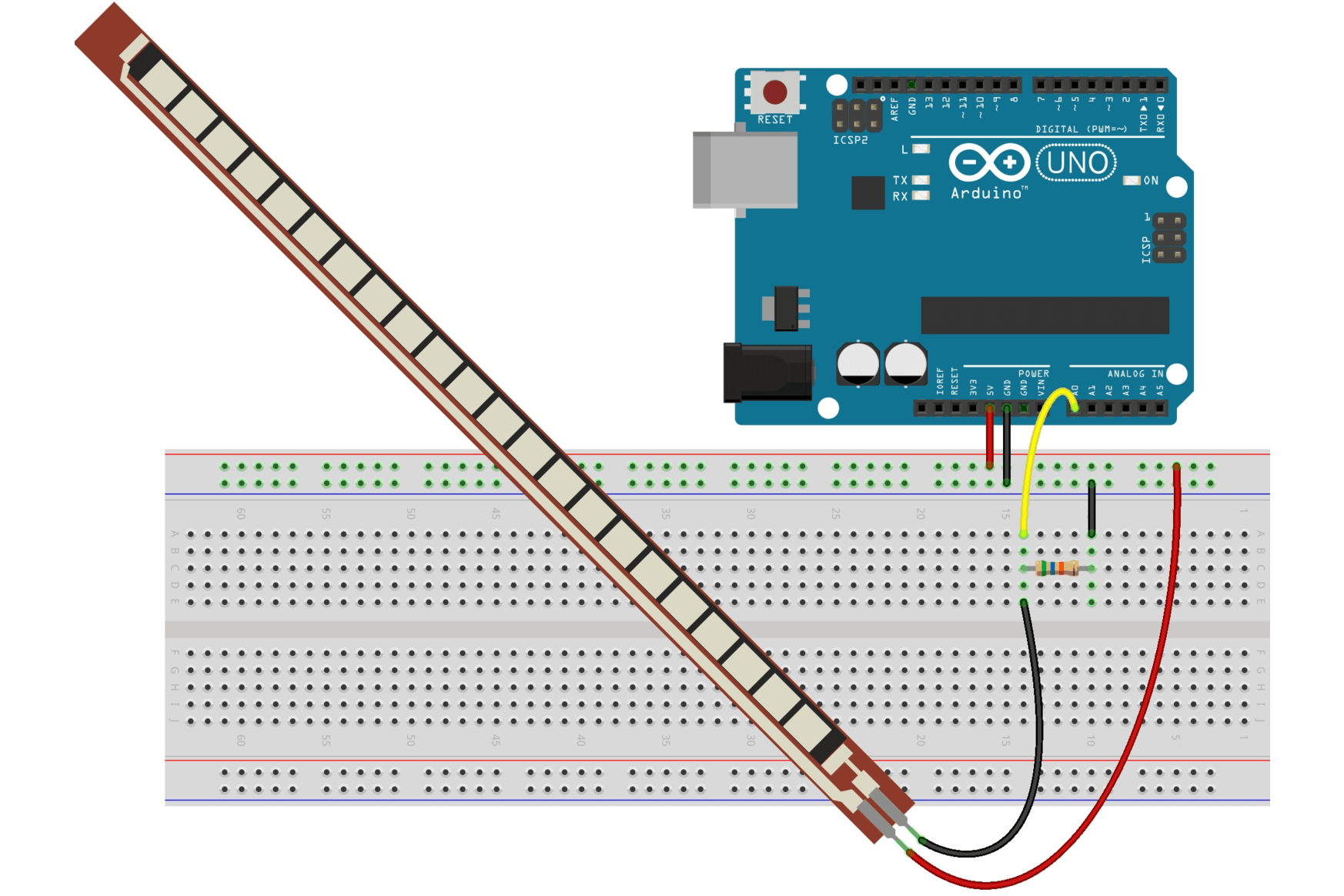
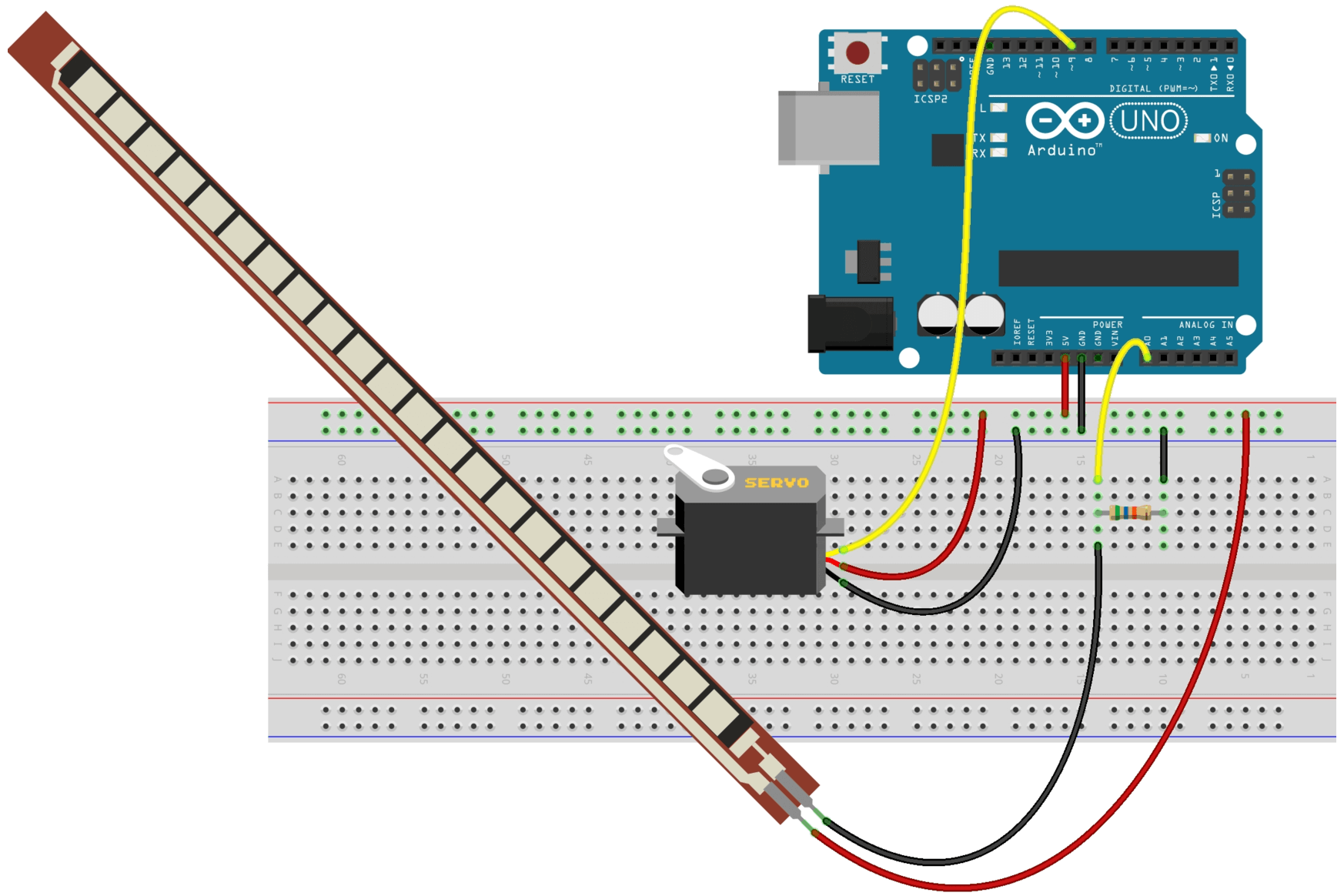
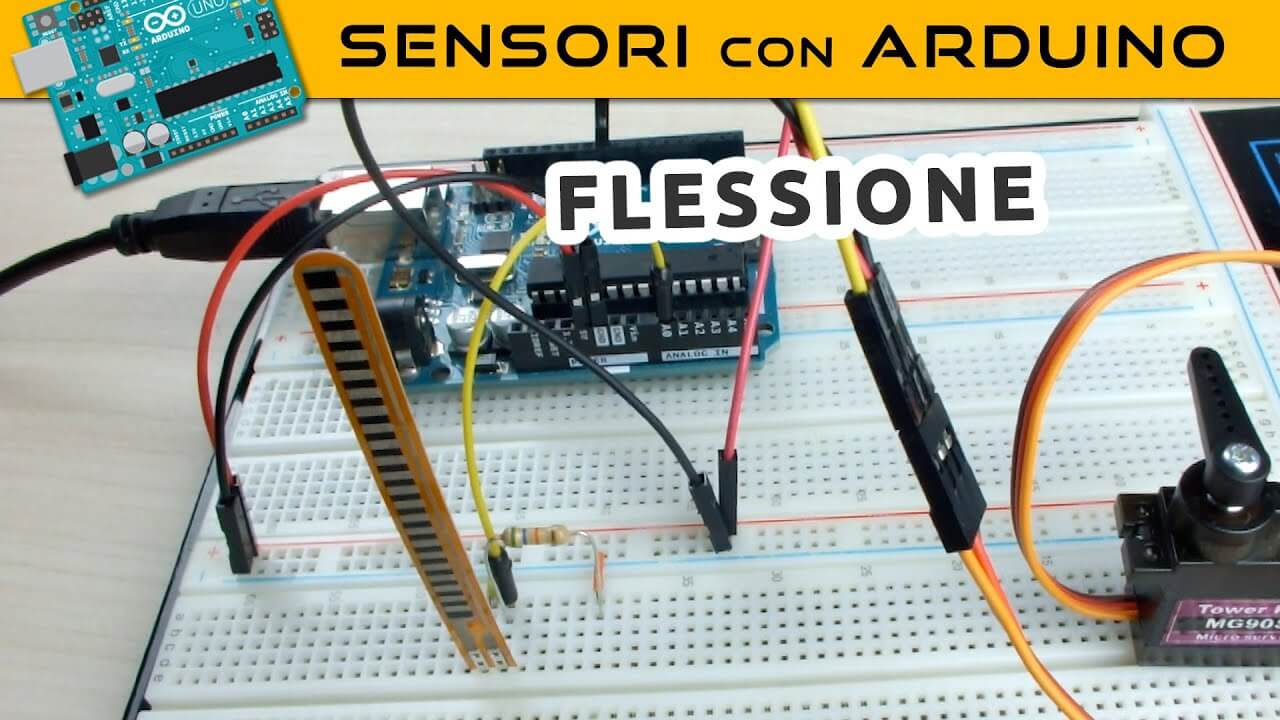
In questo episodio della serie dedicata ai sensori, impareremo a utilizzare un sensore di flessione con Arduino. Vedremo come leggere i dati rilevati, realizzeremo il circuito e scriveremo lo sketch per muovere un servomotore in base alla flessione.
#define FLEX_PIN A0 void setup(){ Serial.begin(9600);} void loop(){ int value = analogRead(FLEX_PIN); Serial.print("ADC: " + String(value)); float v = value * 5.0 / 1023.0; Serial.print(",\tV: " + String(v)); float r = 56000 * (5.0 / v - 1); Serial.println(",\tR: " + String(r)); delay(500);}
#define FLEX_PIN A0 void setup(){ Serial.begin(9600);} void loop(){ int value = analogRead(FLEX_PIN); float v = value * 5.0 / 1023.0; float r = 56000 * (5.0 / v - 1); float angle = map(r, 40000, 99000, 0, 90); Serial.println("Gradi: " + String(angle) + "°"); delay(500);}
#include <Servo.h>#define FLEX_PIN A0#define SERVO_PIN 9 Servo servo; void setup(){ servo.attach(SERVO_PIN);} void loop(){ int value = analogRead(FLEX_PIN); float pos = map(value, 600, 300, 0, 179); pos = constrain(pos, 0, 179); servo.write(pos); delay(10);}
In qualità di Affiliato Amazon riceviamo un guadagno dagli acquisti idonei